
Misja Gynvaela 008
Ostatnio wpadło mi w ręce zadanie podane przez Gynvaela na jednym z ostatnich streamów, które wydało mi się na tyle ciekawe, że postanowiłem je rozwiązać oraz opisać na blogu. Zapraszam więc do dalszego czytania!
MISJA 008 goo.gl/gg4QcA DIFFICULTY: █████████░ [9/10] ┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅ Otrzymaliśmy dość nietypową prośbę o pomoc od lokalnego Instytutu Archeologii. Okazało się, iż podczas prac remontowych studni w pobliskim zamku odkryto niewielki tunel. Poproszono nas abyśmy skorzystali z naszego autonomicznego drona wyposażonego w LIDAR (laserowy skaner odległości zamontowany na obracającej się platformie) do stworzenia mapy tunelu. Przed chwilą dotarliśmy na miejsce i opuściliśmy drona do studni. Interfejs I/O drona znajduje się pod poniższym adresem: http://gynvael.coldwind.pl/misja008_drone_output/ Powodzenia! -- Korzystając z powyższych danych stwórz mapę tunelu (i, jak zwykle, znajdź tajne hasło). Wszelkie dołączone do odpowiedzi animacje są bardzo mile widziane. Odzyskaną wiadomość (oraz mapę) umieśc w komentarzu pod tym video :) Linki do kodu/wpisów na blogu/etc z opisem rozwiązania są również mile widziane! HINT 1: Serwer może wolno odpowiadać a grota jest dość duża. Zachęcam więc do cache'owania danych na dysku (adresy skanów są stałe dla danej pozycji i nigdy nie ulegają zmianie). HINT 2: Hasło będzie można odczytać z mapy po odnalezieniu i zeskanowaniu centralnej komnaty. P.S. Rozwiązanie zadania przedstawię na początku kolejnego livestreama.
Pobieranie wszystkich plików z danymi
Postanowiłem, że zabiorę się do tego zaczynając od pobrania wszystkich plików z danymi do siebie, tak aby móc na nich pracować lokalnie. Założyłem sobie również, że napiszę kod wydzielając odpowiedzialności na poszczególne klasy, czyli postępując jednak w trochę inny sposób niż takie zadania zwykle się rozwiązuje tj. pisząc na szybko jakiś „jednoplikowiec”, który zassie odpowiednie dane oraz później ewentualnie drugi na przetworzenie punktów i narysowanie mapy.
Klasą odpowiedzialną za pobranie plików jest Crawler, który przyjmuje następujące zależności:
- FileHandler – obsługa plików (odczyt, zapis etc.)
- Output – obsługa wyjścia (czyli to co wyrzuca konsola – komunikaty etc.)
- DataParser – parsowanie danych, czyli przekształcanie treści pliku na użyteczny obiekt
Jak działa pobieranie plików?
Początkowo wczytywany jest plik startowy:
SCAN DRONE v0.17.3 32 34 10.015625 10.156250 9.578125 10.000000 9.343750 9.343750 10.015625 9.578125 10.156250 10.000000 10.156250 10.656250 12.703125 12.453125 10.453125 10.406250 10.656250 11.171875 11.000000 11.171875 11.703125 11.562500 10.890625 10.890625 11.562500 10.656250 11.171875 11.015625 11.171875 10.656250 10.406250 10.453125 10.453125 10.406250 9.578125 10.156250 MOVE_EAST: 8deb0b192017a1f44a39a4a93501c985.txt MOVE_WEST: 92906bed3a133722a3c3caf62afd9cff.txt MOVE_SOUTH: db743fbf7f49f9bfa2d48edd613af803.txt MOVE_NORTH: 1ae0fc9499130c246641965299adabaf.txt
Następnie treść zostaje przetworzona, tak aby wydostać z niej nazwy kolejnych plików, które to jeśli nie zawierają nazwy „not_possible”, nie zawierają się w przetworzonych już plikach oraz nie są już zakolejkowane, dodawane są do kolejki. Na potrzeby odpowiedniej organizacji pobierania zaimplementowałem dwie proste struktury danych: kolejkę oraz stos.
Kolejka
<?php
namespace LIDAR\Data;
/**
* Class Queue
* @package LIDAR\Data
*/
final class Queue implements QueueInterface
{
/**
* @var string[]
*/
private $items;
/**
* Queue constructor.
*/
public function __construct()
{
$this->items = [];
}
/**
* @return string
*/
public function get(): string
{
if ($this->isEmpty()) {
throw new \RuntimeException('Queue is empty.');
}
return array_shift($this->items);
}
/**
* @param string $fileName
*/
public function enqueue(string $fileName): void
{
$this->items[] = $fileName;
}
/**
* @param string $fileName
*/
public function dequeue(string $fileName): void
{
if ($key = array_search($fileName, $this->items)) {
unset($this->items[$key]);
}
}
/**
* @return bool
*/
public function isEmpty(): bool
{
return empty($this->items);
}
/**
* @param string $fileName
* @return bool
*/
public function contain(string $fileName): bool
{
return in_array($fileName, $this->items);
}
}
Stos
<?php
namespace LIDAR\Data;
/**
* Class Stack
* @package LIDAR\Data
*/
final class Stack implements StackInterface
{
/**
* @var array
*/
private $items;
/**
* Stack constructor.
*/
public function __construct()
{
$this->items = [];
}
/**
* @param string $fileName
*/
public function push(string $fileName): void
{
$this->items[] = $fileName;
}
/**
* @param string $fileName
* @return bool
*/
public function contain(string $fileName): bool
{
return in_array($fileName, $this->items);
}
}
Z racji iż mój internet do demonów prędkości nie należy, postanowiłem odpalić crawlera na serwerze, co pozwoliło przyśpieszyć trochę całą operację.
Plików jak się okazało jest aż 187 812, które zajmują około 90MB.
Przetwarzanie plików oraz rysowanie mapy
Za rozwiązanie zadania odpowiada klasa Solver, która przyjmuje następujące zależności:
- FileHandler – obsługa plików (odczyt, przeglądanie katalogu etc.)
- Output – obsługa wyjścia (czyli to co wyrzuca konsola – komunikaty etc.)
- DataParser – parsowanie danych, czyli przekształcanie treści pliku na użyteczny obiekt
- Drawer – rysowanie mapy
W tym wypadku doszła jedna dodatkowa zależność – Drawer. Postanowiłem jednak nie przeglądać plików jak poprzednio, lecz po prostu mając je wszystkie na dysku, odczytywać je po kolei z katalogu. Na podstawie danych z każdego pliku, czyli skanów z systemu LIDAR jak mówi nam to treść zadania, mając odległość od drona przy danym kącie liczymy punkty ścian jaskini korzystając z trygonometrii. Odpowiada za to klasa PointCalculator:
<?php
namespace LIDAR\Point;
use LIDAR\Entity\Data;
use LIDAR\Entity\Distance;
use LIDAR\Entity\Point;
/**
* Class PointCalculator
* @package LIDAR\Point
*/
final class PointCalculator implements PointCalculatorInterface
{
/**
* @param Data $data
* @return Point[]
*/
public function calc(Data $data): array
{
$points = [];
foreach ($data->getDistances() as $distance) {
$point = $this->calcPoint($distance, $data->getPoint());
if ($point) {
$points[] = $point;
}
}
return $points;
}
/**
* @param Distance $distance
* @param Point $point
* @return Point|null
*/
private function calcPoint(Distance $distance, Point $point): ?Point
{
if ($distance->getDistance() === -1.0) {
return null;
}
$angle = $distance->getAngle() * M_PI / 180;
$x = round(sin($angle) * $distance->getDistance() + $point->getX());
$y = round(-cos($angle) * $distance->getDistance() + $point->getY());
return (new Point())
->setX($x)
->setY($y)
;
}
}
Problemy
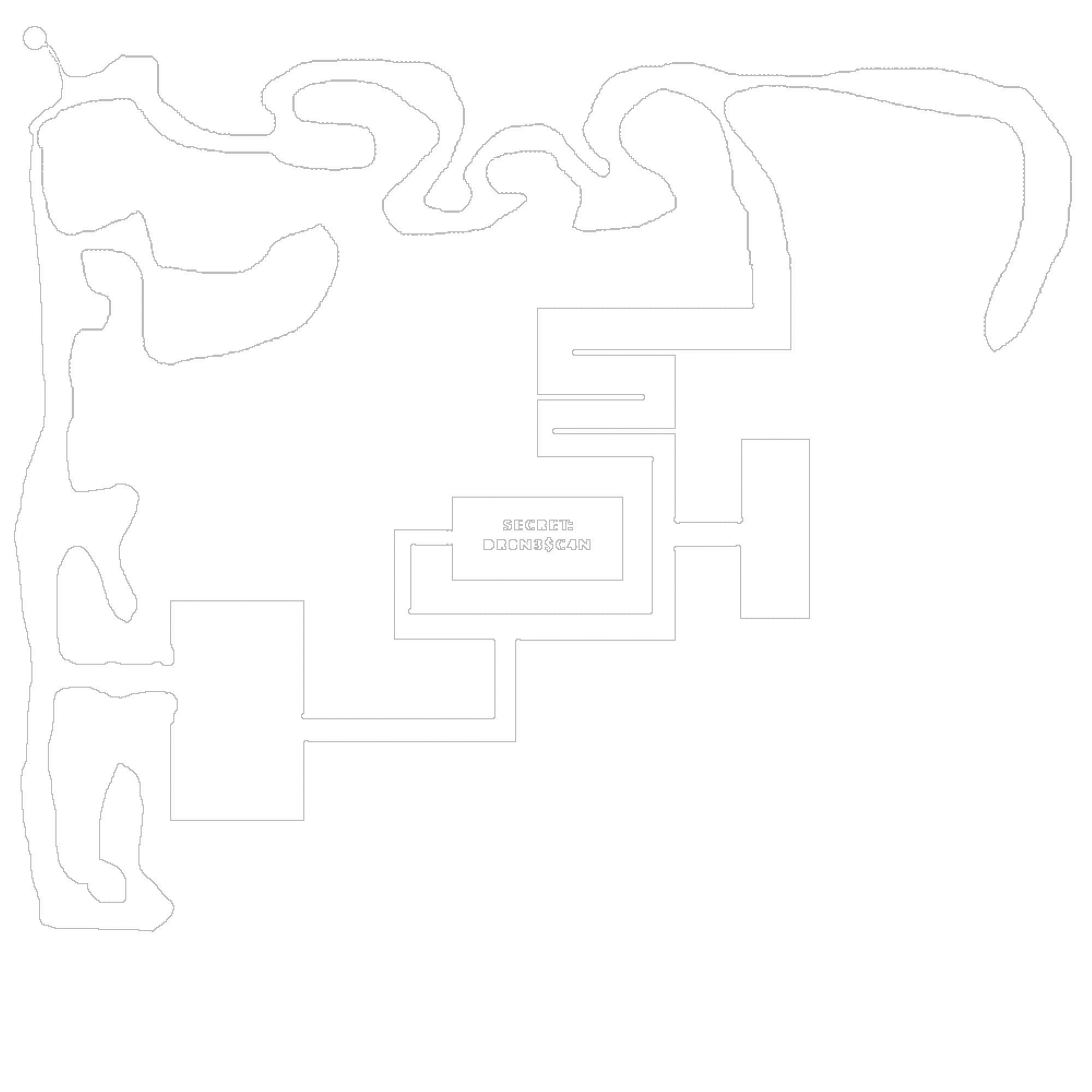
Podany kod działa, jednak działa dosyć wolno, co znacząco utrudnia przetworzenie wszystkich plików. Jednak po sprawdzeniu jak będzie wyglądała mapa po przetworzeniu jedynie 10 000 plików, okazało się, że rozwiązanie jest widoczne.
Cała mapa
Hasło
Całość rozwiązania znaleźć można tutaj.
Postaram się jeszcze pobawić programowaniem współbieżnym, co powinno przyśpieszyć działanie kodu, tak aby dało się przetworzyć wszystko w sensownym czasie. Jeśli masz inny sposób lub wiesz co go tak zwalnia to czekam na komentarz 😉
Subscribe and master unit testing with my FREE eBook (+60 pages)! 🚀
 In these times, the benefits of writing unit tests are huge. I think that most of the recently started projects contain unit tests. In enterprise applications with a lot of business logic, unit tests are the most important tests, because they are fast and can us instantly assure that our implementation is correct. However, I often see a problem with good tests in projects, though these tests’ benefits are only huge when you have good unit tests. So in this ebook, I share many tips on what to do to write good unit tests.
In these times, the benefits of writing unit tests are huge. I think that most of the recently started projects contain unit tests. In enterprise applications with a lot of business logic, unit tests are the most important tests, because they are fast and can us instantly assure that our implementation is correct. However, I often see a problem with good tests in projects, though these tests’ benefits are only huge when you have good unit tests. So in this ebook, I share many tips on what to do to write good unit tests.
Jak odpalić ten kod z Github? Sklonowałem repozytorium, użyłem composer’a do instalacji, utworzyłem katalog „data” gdzie umieściłem plik startowy i nie zadziałało.
https://pastebin.com/dEpRWG5Q
Robisz po prostu git clone, a później php crawler.php. Jak wszystkie pliki zostaną pobrane to wtedy: php solver.php. Tylko zrób to od nowa, bo tam pobrałeś plik ręcznie i wyrzuca błąd, że już taki plik istnieje.
Sarven, gdybym tak wcześniej nie próbował, to bym nie pytał 🙂 Tak się dzieje bez uprzednich przygotowań na Ubuntu 18.04 z PHP 7.2 (na 16.04 z PHP 7.0 też):
https://pastebin.com/qcZisWnh
To kwestia uprawnień, spróbuj wcześniej utworzyć katalog data w głównym katalogu projektu. Po prostu: mkdir data.
Sarven dobrze gada, dajcie mu ugryźć kiełbasy 🙂 Poprawiłbym jednak te drobnostki, aby następny użytkownik jak ja miał łatwiej. W końcu użytkownik jakiegokolwiek systemu ma go używać, a nie zastanawiać się dlaczego coś nie zadziałało. Tak, wiem że to był CTF a tam liczy się czas.
Aby zadziałało przyszłym użytkownikom należy dodać do repozytorium katalog „data” oraz „map”. Póki tego nie ma, aby uruchomić program należy wykonać poniższe zaklęcia:
git clone https://github.com/sarven/misja-gynvaela-008
cd misja-gynvaela-008
mkdir data map
composer install
php crawler.php
php solver.php
Crawler chyba z 6 godzin potrzebował – tyle tych plików, Solver jedynie 19 sekund na i5. Oto efekt:
https://mega.nz/#!xBQyGSQB!bWdI9TOyRoLSMv5MHnOHaq7ara3QN9tmw4kyz7_B55s
Ja co prawda od dawna w PHP programuje, ale zaczynałem jeszcze w czasach gdy nie było obsługi obiektowości. Aktualnie jestem na etapie zmiany paradygmatu oraz poznawanie tych wszystkich współczesnych narzędzi jak composer, git, vagrant, docker, phpunit, jenkins itd – oraz przede wszystkim myślenia obiektowego. Dzięki za ciekawy przykład do analizy i nauki.
Pozdrawiam.